
- Afhalen na 1 uur in een winkel met voorraad
- Gratis thuislevering in België vanaf € 30
- Ruim aanbod met 7 miljoen producten
- Afhalen na 1 uur in een winkel met voorraad
- Gratis thuislevering in België vanaf € 30
- Ruim aanbod met 7 miljoen producten


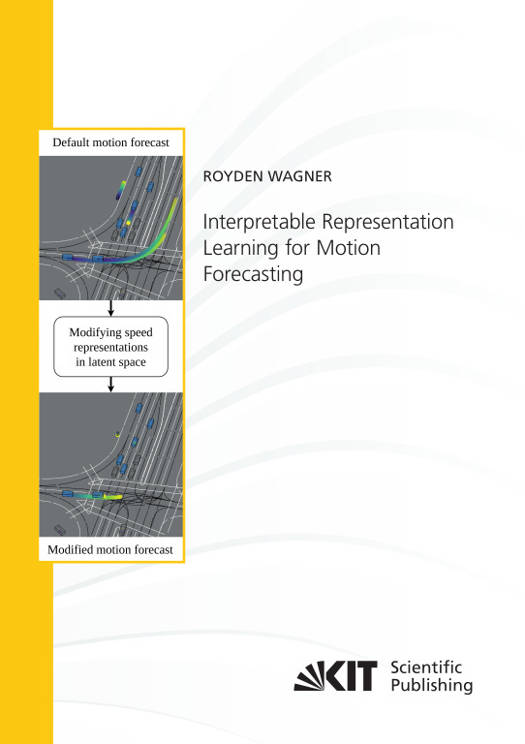
Interpretable Representation Learning for Motion Forecasting
Royden Wagner
€ 39,95
+ 79 punten
Omschrijving
We address interpretable representation learning for motion forecasting in self-driving cars. Rather than treating transformers as black boxes, we develop methods to interpret and modify learned representations. We introduce self-supervised pre-training with interpretable objectives. Moreover, we probe latent spaces of forecasting models and reveal interpretable features, allowing us to make targeted interventions. Finally, we uncover retrocausal mechanisms, which enable goal-based instructions.
Specificaties
Betrokkenen
- Auteur(s):
- Uitgeverij:
Inhoud
- Taal:
- Engels
- Reeks:
Eigenschappen
- Productcode (EAN):
- 9783731514749
- Uitvoering:
- Paperback
- Afmetingen:
- 148 mm x 210 mm
- Gewicht:
- 330 g



Alleen bij Standaard Boekhandel
+ 79 punten op je klantenkaart van Standaard Boekhandel
Cadeau

AANGERADEN


Beoordelingen
We publiceren alleen reviews die voldoen aan de voorwaarden voor reviews. Bekijk onze voorwaarden voor reviews.