
- Afhalen na 1 uur in een winkel met voorraad
- Gratis thuislevering in België vanaf € 30
- Ruim aanbod met 7 miljoen producten
- Afhalen na 1 uur in een winkel met voorraad
- Gratis thuislevering in België vanaf € 30
- Ruim aanbod met 7 miljoen producten




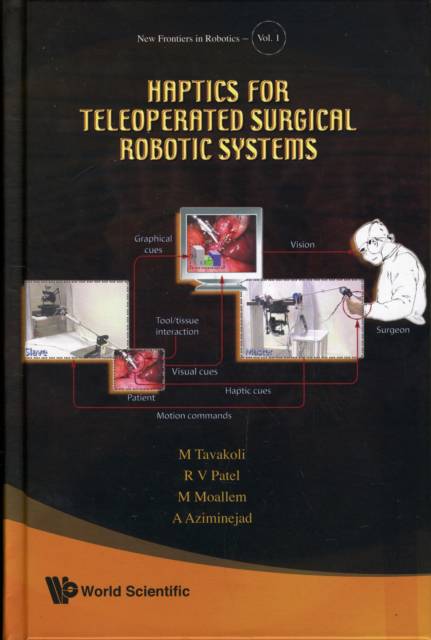
Haptics for Teleoperated Surgical Robotic Systems
Mahdi Tavakoli, Rajni V Patel, Mehrdad Moallen, Arash Aziminejad
€ 124,45
+ 248 punten
Omschrijving
An important obstacle in Minimally Invasive Surgery (MIS) is the significant degradation of haptic feedback (sensation of touch) to the surgeon about surgical instrument's interaction with tissue. This monograph is concerned with devices and methods required for incorporating haptic feedback in master-slave robotic MIS systems. In terms of devices, novel mechanisms are designed including a surgical end-effector (slave) with full force sensing capabilities and a surgeon-robot interface (master) with full force feedback capabilities. Using the master-slave system, various haptic teleoperation control schemes are compared in terms of stability and performance, and passivity-based time delay compensation for haptic teleoperation over a long distance is investigated. The monograph also compares haptic feedback with visual feedback and with substitution for haptic feedback by other sensory cues in terms of surgical task performance.
Specificaties
Betrokkenen
- Auteur(s):
- Uitgeverij:
Inhoud
- Aantal bladzijden:
- 180
- Taal:
- Engels
- Reeks:
- Reeksnummer:
- nr. 1
Eigenschappen
- Productcode (EAN):
- 9789812813152
- Verschijningsdatum:
- 1/05/2008
- Uitvoering:
- Hardcover
- Formaat:
- Genaaid
- Afmetingen:
- 153 mm x 235 mm
- Gewicht:
- 467 g


Alleen bij Standaard Boekhandel
+ 248 punten op je klantenkaart van Standaard Boekhandel
CADEAU


Beoordelingen
We publiceren alleen reviews die voldoen aan de voorwaarden voor reviews. Bekijk onze voorwaarden voor reviews.